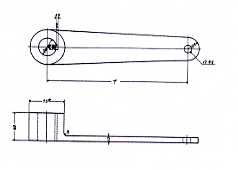
腕の図面。図面には横の数値の記載がなく、別表に2通りの数値が記載されています。
長短の腕をいっしょにケガキ。使用する真鍮パイプの大きさが限られているので、図面とは若干イメージが違いますね。軸受と同様に、肉厚0.5mmの6φの内側に肉厚0.5mmの5φを入れて使用。
4.0mmアルミ丸棒を垂直に立てたジグを作って腕の組み立てをしようと考えましたが、アルミ丸棒が手に入りません。そこで、真鍮板に5.0mmの穴をあけて5φを立て、6φは真鍮板にのせるだけにしました。段差を付けた方が、そのままのせるより強度が出るかなとも考えました。分かりにくいですかね。要するに5.0mmのドリル穴。食い込みしないよう慎重に……。今回は大丈夫!

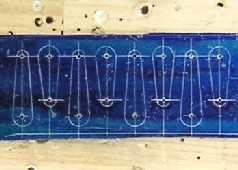
腕になる真鍮板を切り出します。青ニスがあるうちに先端のアールをヤスリ仕上げしておきます。残りの成形はパイプをハンダ付けした後で。

軸を通すパイプの切り出し。6φ×4.0mmと5φ×5.0mmがそれぞれ8個ずつ。前回と同様に、所定の厚みのアルミ材をガイドにして長さの仕上げ。

切り出して仕上げたアルミパイプ。組立しやすいように内径は0.1mm拡幅してあります。手間がかかっても切り出してからハンダ付け。

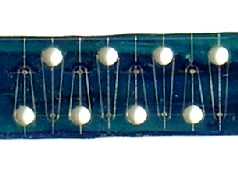
真鍮板の穴に5φパイプを差し込み、そのパイプに6φパイプを重ねます。こうしておいてハンダでしっかり固定。

最初に仕上げておいた先端部分を通る直線がパイプに接するようにヤスリで仕上げ。残りの不要部分を削り落して出来上がり。
